|
Research Scientist@INSAIT, adviced by Prof. Luc Van Gool and Dr. Danda Pani Paudel. I earned my Ph.D. from Zhejiang University, privileged to be supervised by the best professor in the world——my life-long mentor and role model, Prof. Kaiwei Wang (汪凯巍). I also had the privilege to be supervised by Prof. Davide Scaramuzza at the Robotics and Perception Group, University of Zurich, and Prof. Luc Van Gool at the Computer Vision Lab, ETH Zurich. I also work closely with Prof. Ming-Hsuan Yang from UC Merced and Google DeepMind. I'm interested in image/video generation, computational imaging, and event-based vision. I am always open to collaborate. Drop me a email if you are interested! Email / Google Scholar / Linkedin / Github |

|
|
{kind=link}
|
First-author papers and corresponding author papers are highlighted. * denotes equal contribution and † denotes corresponding author. |
|
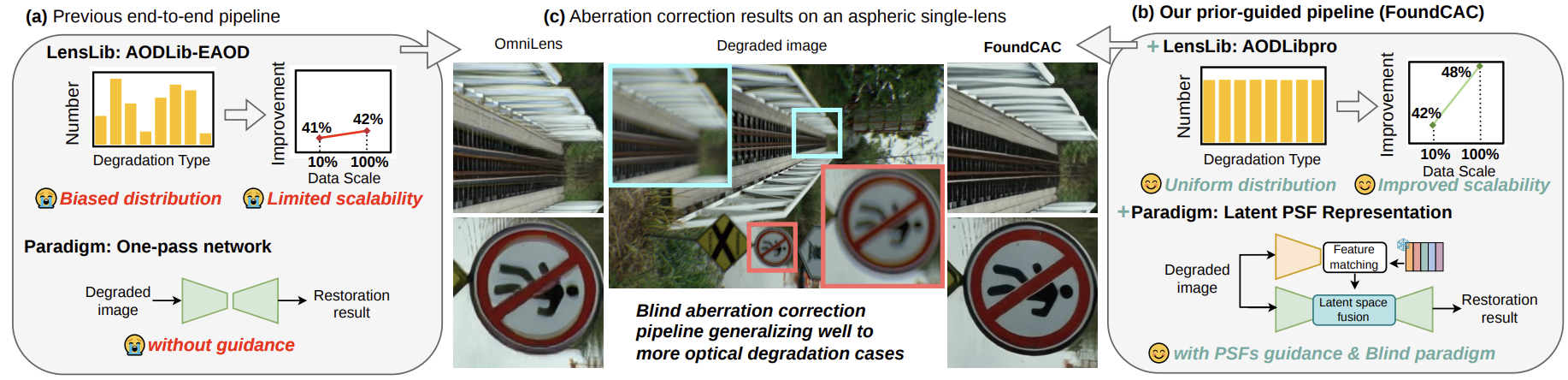
Qi Jiang, Xiaolong Qian*, Yao Gao, Lei Sun†, Kailun Yang, Xian Wang, Zhonghua Yi, Wenyong Li, Ming-Hsuan Yang, Luc Van Gool, Kaiwei Wang† ICCP, 2026 arXiv FoundCAC, a universal foundational framework for blind lens aberration correction that pre-trains on a large-scale, diversity-stratified LensLib (AODLibpro) and regularizes restoration with a discrete Latent PSF Representation, achieving state-of-the-art zero-shot performance and efficient few-shot adaptation to unseen lenses. |
|
|
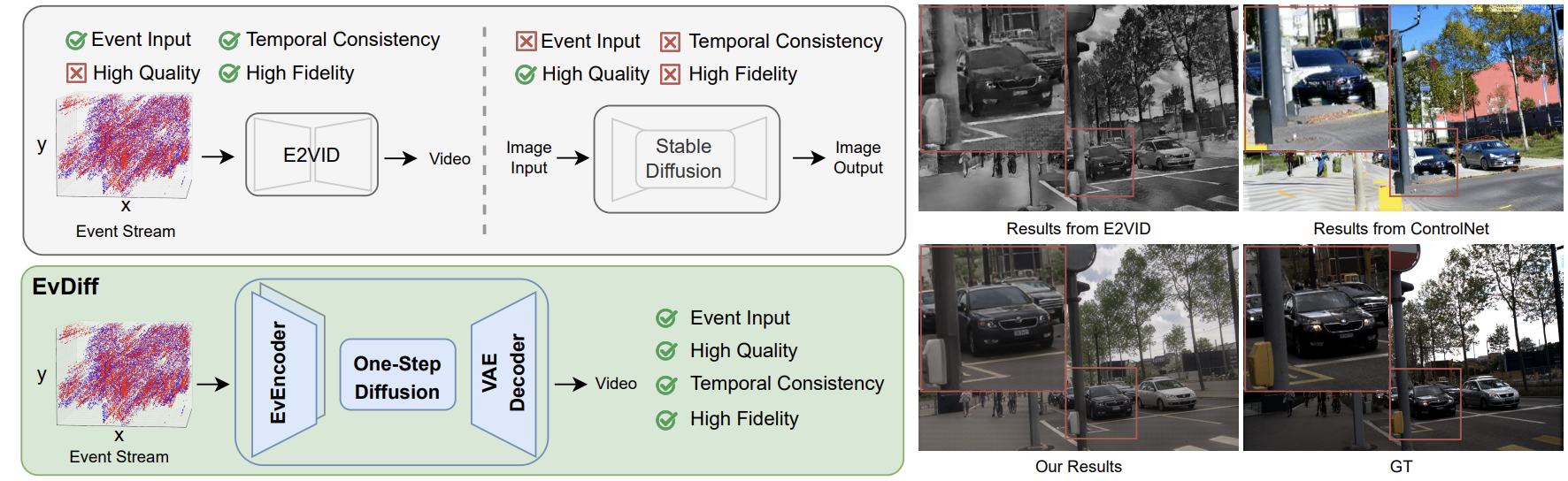
Weilun Li*, Lei Sun*†, Ruixi Gao, Qi Jiang, Yuqin Ma, Kaiwei Wang†, Ming-Hsuan Yang, Luc Van Gool, Danda Pani Paudel ECCV, 2026 arXiv A diffusion model that reconstructs high-quality, colorful video from event streams in a single forward step, trained without paired event-image data via a surrogate training framework. |
|
|
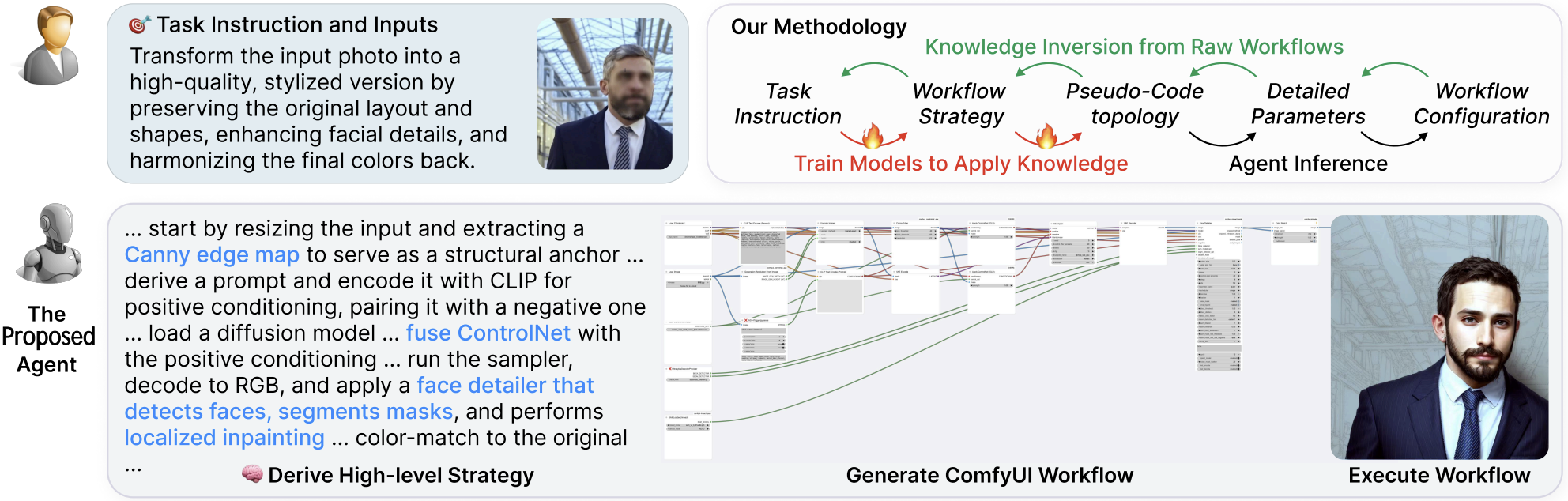
Zhendong Li, Lei Sun†, Ruibo Ming, He Zhang, Danda Pani Paudel, Luc Van Gool, Jinjin Gu† ECCV, 2026 arXiv A knowledge-centric agent framework that reasons progressively from task description to strategy to executable structure for generating ComfyUI workflows, with bidirectional self-correction at deployment. |
|

|
Dannong Xu*, Zhongyu Yang*, Jun Chen, Yingfang Yuan, Ming Hu, Lei Sun, Luc Van Gool, Danda Pani Paudel, Chun-Mei Feng† ECCV, 2026 project page / arXiv A benchmark of 46K+ multimodal retrieval candidates across images, videos, and documents, showing that retrieving evidence from heterogeneous corpora—not reasoning given evidence—is the main bottleneck for MLLMs. |
|
|
Jingyun Liang, Jingkai Zhou, Shikai Li, Chenjie Cao, Lei Sun†, Yichen Qian, Weihua Chen†, Fan Wang ICML, 2026 project page / arXiv / Codes We present a controllable human video generation framework that flexibly combines any subject, background, trajectory, and action to create realistic videos of anyone doing anything anywhere. |
|
|
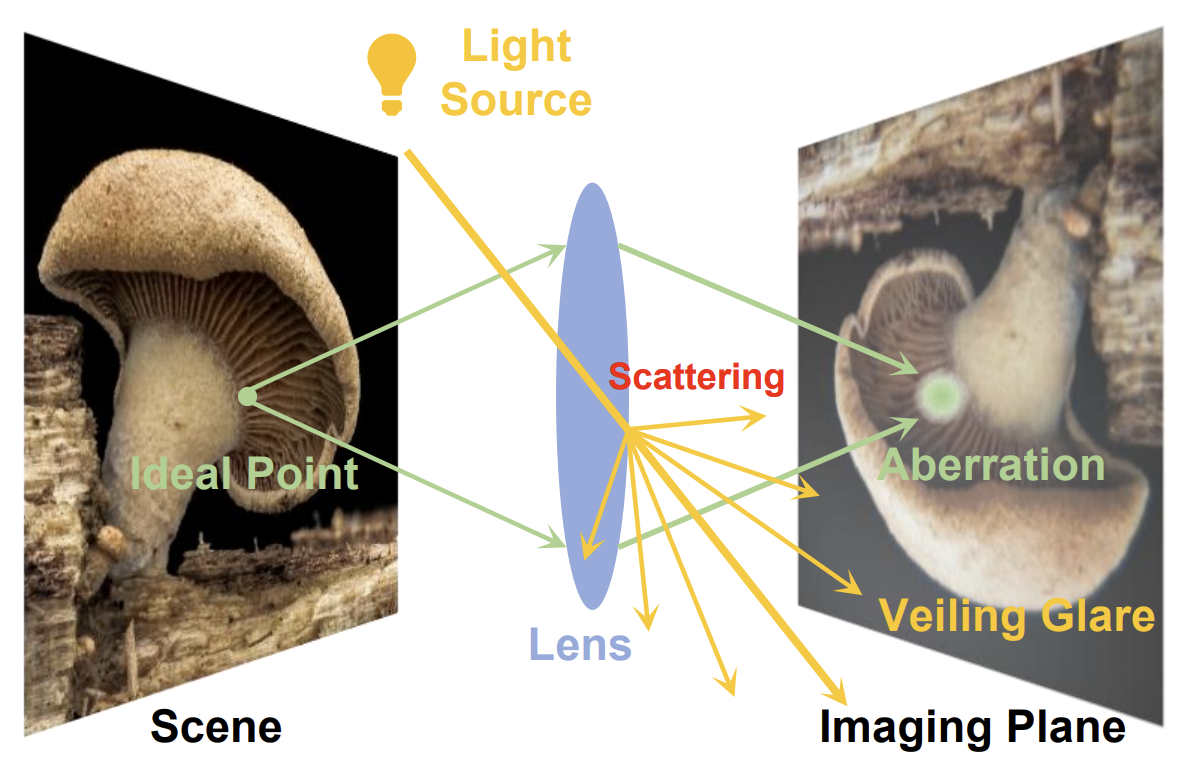
Xiaolong Qian*, Qi Jiang*, Lei Sun†, Zongxi Yu, Kailun Yang, Peixuan Wu, Jiacheng Zhou, Yao Gao, Yaoguang Ma, Ming-Hsuan Yang, Kaiwei Wang† CVPR, 2026 (Highlight) Project Page / arXiv / Codes Removing lens veiling glare from images. |
|
|
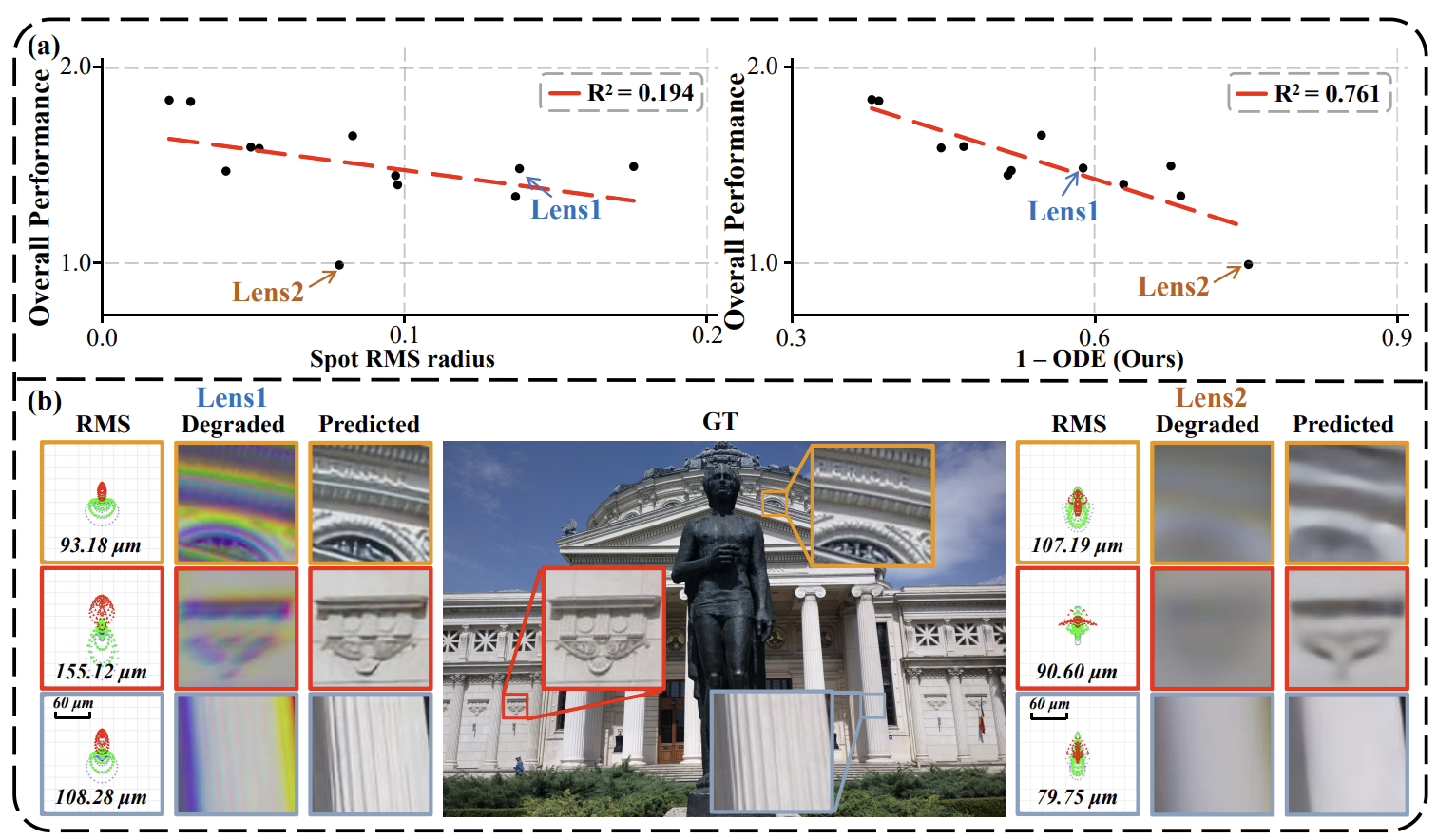
Xiaolong Qian*, Qi Jiang*, Yao Gao, Lei Sun†, Zhonghua Yi, Kailun Yang, Luc Van Gool, Kaiwei Wang† CVPR, 2026 arXiv / Codes large-scale dataset and benchmark for photographic cameras, built via automatic optical design to cover diverse optical aberrations. |
|
|
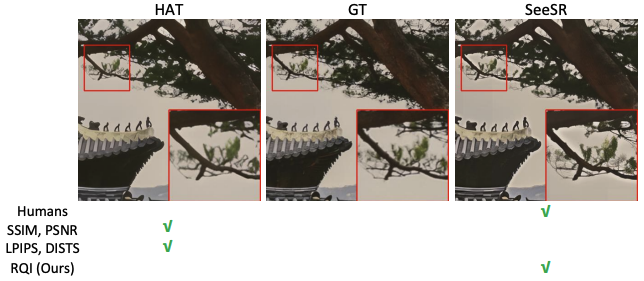
Shaolin Su, Josep M. Rocafort, Danna Xue, David Serrano-Lozano, Lei Sun, Javier Vazquez-Corral CVPR, 2026 Project Page / arXiv Better IQA metrics for diffusion-based SR models. |
|
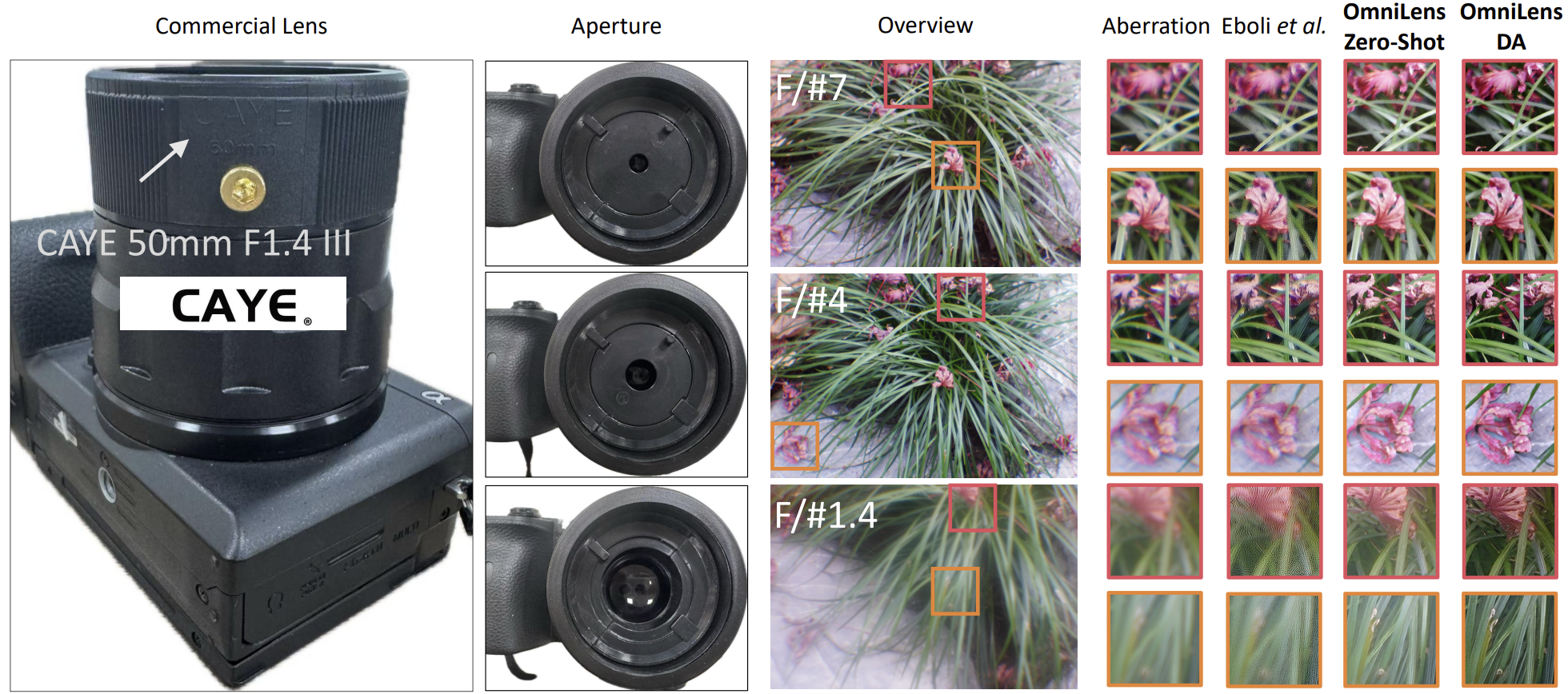
Qi Jiang*, Yao Gao*, Shaohua Gao, Zhonghua Yi, Xiaolong Qian, Hao Shi, Kailun Yang, Lei Sun†, Kaiwei Wang†, Jian Bai Optics & Laser Technology, 2026 arXiv / Codes OmniLens, a flexible solution to universal computational aberration correction via large-scale LensLib pre-training and adapting the model to any specific lens designs with unknown lens descriptions via fast LensLib-to-specific domain adaptation. |
|
|
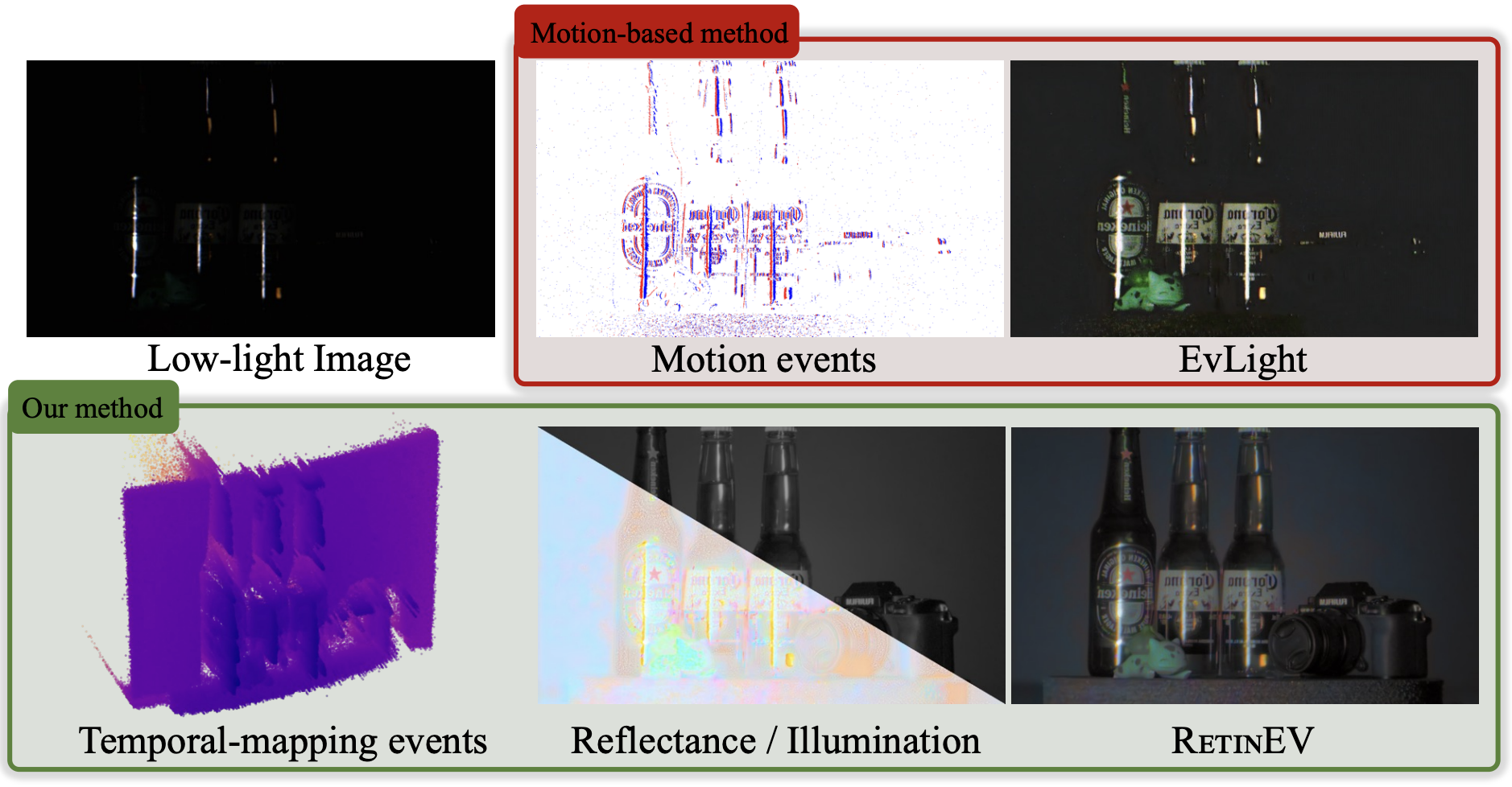
Lei Sun, Yuhan Bao, Jiajun Zhai, Jingyun Liang, Yulun Zhang, Kaiwei Wang, Danda Pani Paudel, Luc Van Gool ICCV, 2025 arXiv Best low-light image enhancement method with event camera so far. |
|
|
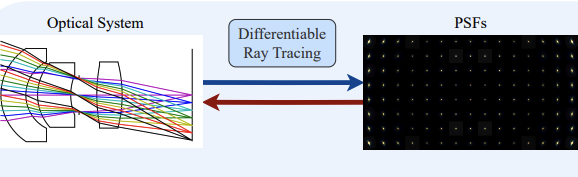
Yao Gao, Qi Jiang, Shaohua Gao, Lei Sun, Kailun Yang, Kaiwei Wang IEEE Transactions on Computational Imaging, 2025 arXiv / Paper / Codes The best algorithm (so far) for the automatic design of compound-lens-based computational imaging systems. |
|
|
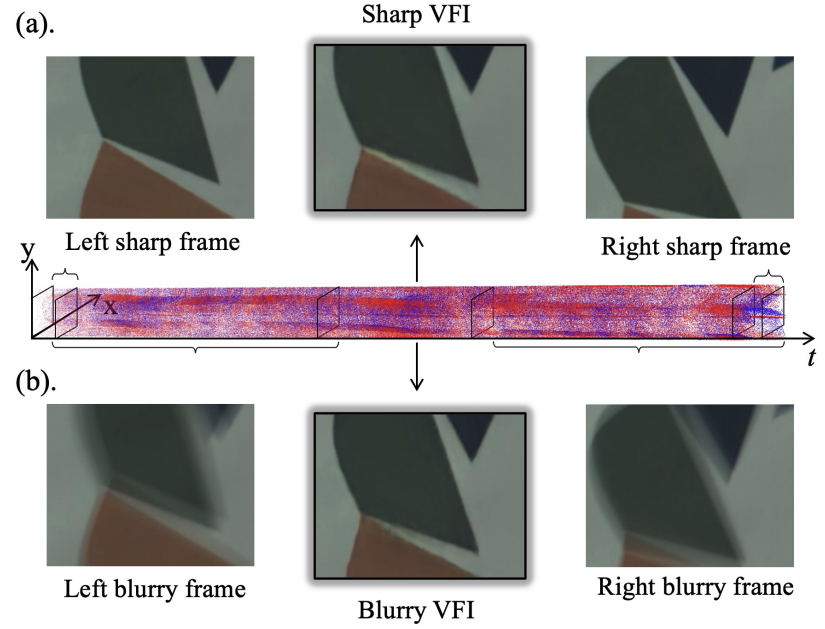
Lei Sun, Daniel Gehrig, Christos Sakaridis, Mathias Gehrig, Jingyun Liang, Peng Sun, Zhiije Xu, Kaiwei Wang, Luc Van Gool, and Davide Scaramuzza T-PAMI, 2025 codes / arXiv / video Unified Event-based frame interpolation for both sharp frames and blurry frames with unsupervised domain adaption for unkown camera parameters. |
|
|
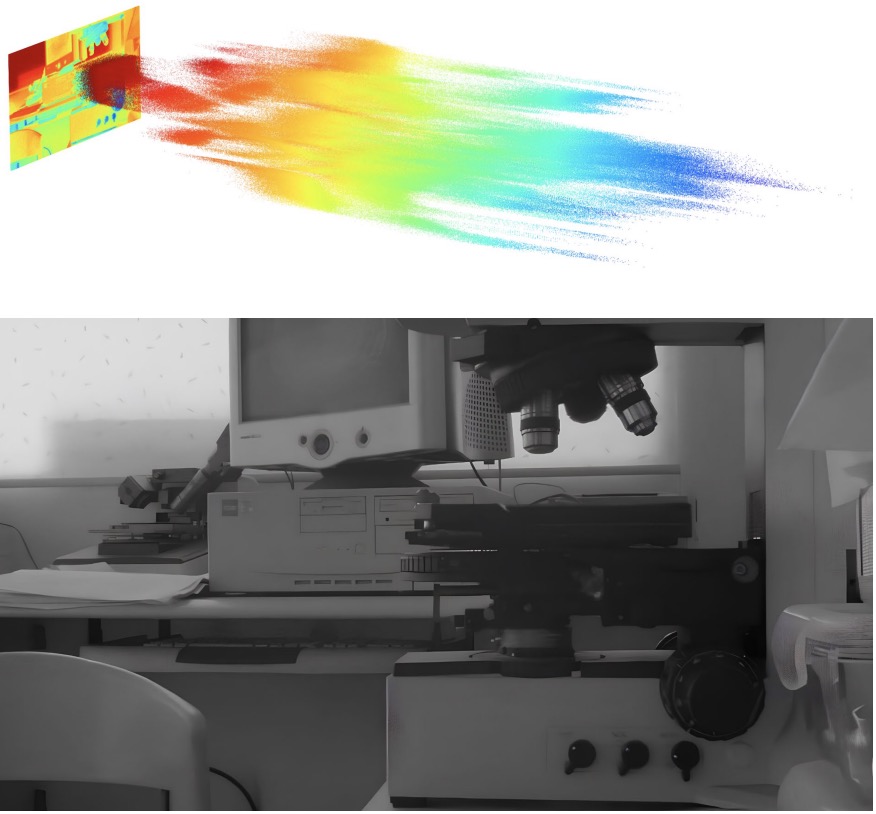
Yuhan Bao*, Lei Sun*†, Yuqin Ma, Diyang Gu, Kaiwei Wang† ECCV, 2024 Github / arXiv EvTemMap, pioneering work of event-to-image conversion, produces high-quality, high-grascale-resolution, high-dynamic-range image from events only. |
|

|
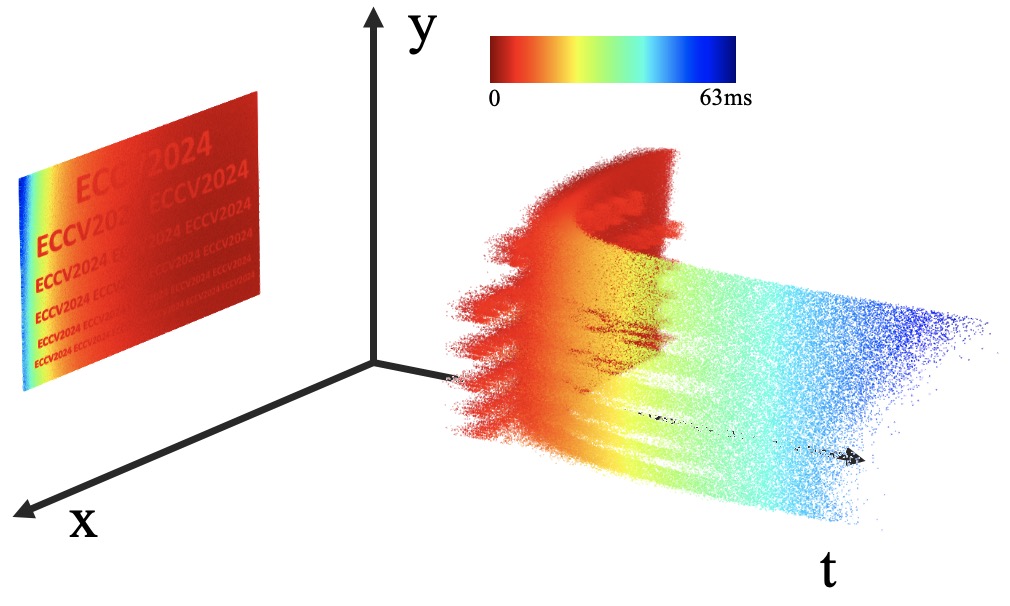
Xingyu Lu, Lei Sun† , Diyang Gu, Zhijiie Xu, Kaiwei Wang† Optics Express, 2024 arXiv Event-based depth estimation for dynamic scenes, over 41 times faster in data acquisition than previous SOTA. |
|
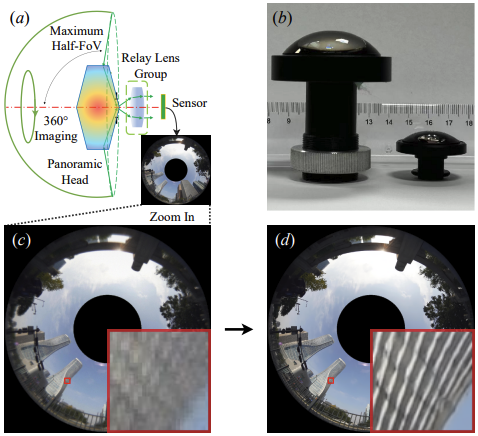
Qi Jiang, Shaohua Gao, Yao Gao, Kailun Yang, Zhonghua Yi, Hao Shi, Lei Sun, Kaiwei Wang T-IP, 2024 arXiv / codes A Panoramic Computational Imaging Engine to achieve minimalist and high-quality panoramic imaging. |

|
Yuhan Bao, Lei Sun, Yuqin Ma, Diyang Gu, Kaiwei Wang Optics Express, 2023 (Editors' Pick) codes coming soon Event-assisted fast auto-focus algorithm. Precise focus with less than one depth of focus is achieved within 0.004 seconds. |
|

|
Lei Sun, Christos Sakaridis, Jingyun Liang, Peng Sun, Jiezhang Cao, Kai Zhang, Qi Jiang, Kaiwei Wang, Luc Van Gool CVPR, 2023 codes / paper / Video SOTA unified Event-based frame interpolation for both sharp frames and blurry frames. |
|

|
Lei Sun, Christos Sakaridis, Jingyun Liang, Qi Jiang, Kailun Yang, Peng Sun, Yaozu Ye, Kaiwei Wang, Luc Van Gool ECCV, 2022 (Oral Presentation, rate:2.7%) project page / codes / arXiv We present a novel event-based deblurring method that improves the previous state-of-the-art by 2.47 dB. |
|

|
Qi Jiang, Hao Shi, Lei Sun, Shaohua Gao, Kailun Yang, Kaiwei Wang IEEE Transactions on Computational Imaging, 2022 codes Annular Computational Imaging (ACI) framework to break the optical limit of light-weight Panoramic Annular Lens design. |
|
|
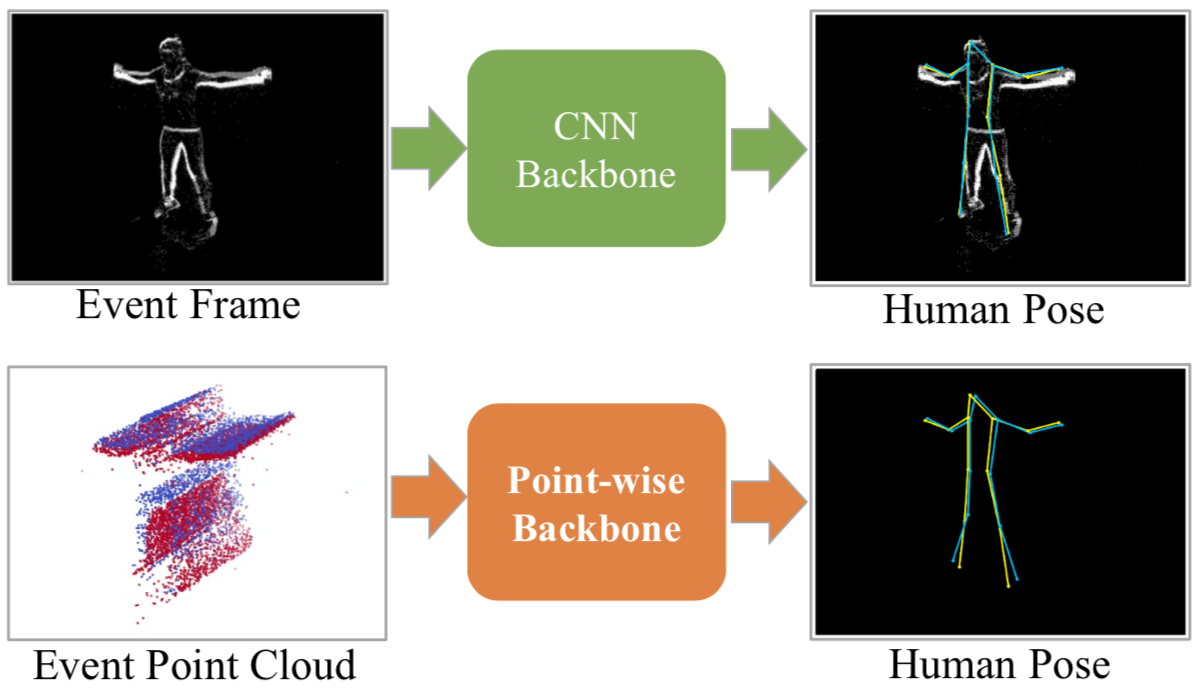
Jiaan Chen*, Hao Shi*, Yaozu Ye, Kailun Yang, Lei Sun, Kaiwei Wang 3DV, 2022 codes A lightweight event-based human pose estimation model by processing events as point cloud. |
|

|
Shaohua Gao, Lei Sun, Qi Jiang, Hao Shi, Jia Wang, Kaiwei Wang, Jian Bai Optics Express, 2022 (Editors' Pick) Designing a lightweight panoramic annular lens with physical-based image enhancement model. |
|

|
Jia Wang, Kailun Yang, Shaohua Gao, Lei Sun, Chenxi Zhu, Kaiwei Wang, Jian Bai Optical Engineering 61 (3), 035101, 2022 Designing a panoramic annular lens (PAL) system with 4K high resolution for aerial image segmentation. |
|

|
Lei Sun, Jia Wang, Kailun Yang, Kaikai Wu, Xiangdong Zhou, Kaiwei Wang, Jian Bai European Conference on Mobile Robots (ECMR) 2021 Designing a specific semantic segmentation for aerial panoramic images. |
|

|
Lei Sun, Kailun Yang, Xinxin Hu, Weijian Hu, Kaiwei Wang IEEE Robotics and Automation Letters, IROS 2020 (Oral Presentation) codes A real-time RGB-D fusion semantic segmentation framework with small obstacle detection. |
|

|
Weijian Hu, Kaiwei Wang, Kailun Yang, Ruiqi Cheng, Yaozu Ye, Lei Sun, Zhijie Xu Sensors 20 (11), 3222, 2020 Propose three different auditory-based interaction methods which convey raw depth images, obstacle information and path information respectively to visually impaired people. |
|

|
Yicheng Fang, Kailun Yang, Ruiqi Cheng, Lei Sun, Kaiwei Wang Sensors 20 (15), 4177, 2020 Propose a panoramic localizer, which is based on coarse-to-fine descriptors, leveraging panoramas for omnidirectional perception and sufficient FoV up to 360◦. |
|

|
Yaozu Ye, Kaiwei Wang, Weijian Hu, Huabing Li, Kailun Yang, Lei Sun, Zuobing Chen Journal of Physics: Conference Series 1229 (1), 012026, 2019 Develop a wearable system to transform the spatial information captured by camera into a voice description and fed it back to blind users. |
|

|
Lei Sun, Kailun Yang, Kaiwei Wang, Kaite Xiang Artificial Intelligence and Machine Learning in Defense Applications, SPIE 1229 (1), 012026, 2019 Propose a framework to alleviate the accuracy decline when semantic segmentation is taken to adverse conditions by using Generative Adversarial Networks (GANs). |
|
|
Organizer/Program Chair of CVPR 2026 Workshop on Agentic AI for Visual Media. Co-organizer of CVPR 2026 New Trends in Image Restoration and Enhancement (NTIRE) workshop. Organizer of the Challenge On Event-based Image Deblurring, Challenge on Image Denoising, the First Blind Computational Aberration Correction Challenge, and the Efficient Super-Resolution Challenge Co-organizer of CVPR 2025 New Trends in Image Restoration and Enhancement (NTIRE) workshop. Organizer of the First Challenge On Event-based Image Deblurring in CVPR 2025 NTIRE workshop & Event-Based Vision workshop. Organizer of the Challenge On Image Denoising. Co-organizer of the Challenge On Image Super-Resolution, and Challenge on Real-World Face Restoration. Area Chair for ICML 2026, NeurIPS 2026. Reviewer for CVPR, ICCV, ECCV, AAAI, WACV, IJCV, TPAMI, TIP, RA-L, CVIU. |
|
Dec. 2025: Invited talk on intellegent optical system in College of Optical Science and Engineering, Zhejiang University. Dec. 2025: Invited talk on intellegent optical system in College of Computer Science, Chongqing University. Oct. 2022: [ Video ] Invited talk on event-based image deblurring in Mobile Intelligent Photography and Imaging (MIPI) . Jun. 2022: Invited talk in IV 2022 BSL Workshop. |
|
|
|
|
Research Scientist
INSAIT Sofia, Bulgaria Oct. 2025 ~ Now Supervisor: Prof. Luc Van Gool Co-supervisor: Dr. Danda Pani Paudel |
|
|
Post-doc researcher
INSAIT Sofia, Bulgaria Oct. 2024 ~ Oct. 2025 Supervisor: Prof. Luc Van Gool Co-supervisor: Dr. Danda Pani Paudel |
|
|

|
Visiting doctoral student
Robotics and Perception Group, University of Zurich and ETH Zurich Zurich, Switzerland Jan. 2023 ~ Sep. 2023 Supervisor: Prof. Davide Scaramuzza |

|
Visiting doctoral student
Computer Vision Lab, ETH Zurich Zurich, Switzerland Sep. 2021 ~ Jan. 2023 Supervisor: Prof. Luc Van Gool |
|
|
Doctor of Philosophy
Zhejiang University Hangzhou, China Sep. 2018 ~ Jun. 2024 Supervisor: Prof. Kaiwei Wang |
|
|
Bachelor's degree
Beijing Institute of Technology Beijing, China Sep. 2014 ~ Jun. 2018 |
|
Website template from Jon Barron |